 注:本产品为国债项目采购产品
注:本产品为国债项目采购产品
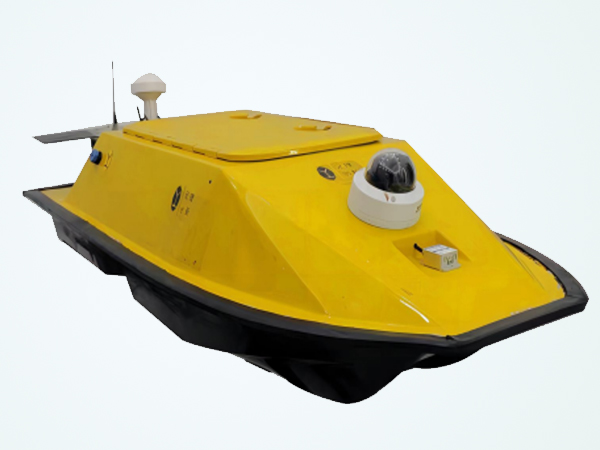
产品概述
无人船 USV-1300
部分技术参数
1、船舶主尺度:长×宽×高:1400×640×550mm;设计排水量:35kg;自重15KG;负载能力 20kg;
2、船型为:双体 M 槽道滑行艇;
3、快速性要求:经济航速 3kn,最高航速 9kn;
4、抗风浪等级:3 级风,2 级浪;
4、能源系统:搭载 24V40AH*2 的磷酸铁锂电池;续航时间 8 小时@满功率;整 船搭载防水一键启动按键;
5、推进器配置:免维护、全密封深水推进器, 2 个推进器,功率250W;
6、感知系统:工业级 GPS 模块、工业级电子罗盘、工业级姿态传感器;
其中:高精度移动 GPS 模块
(1)通道:120 通道;支持:BDS 、GPS 、GLONASS 、Galileo 定位信号;
(2)定位精度:Single 优于 1.0m
(3)更新率:5Hz;
(4)启动时间:冷启动:<55s 热启动:<40s
(5)时间精度优于 20nsRMS;速度精优于 0.03m/s RMS;
(6)串口需包含 2 路 RS232;
其中:动态测量九轴模块(电子罗盘+姿态传感器)
(1 )电源电压范围:12V—35V ;工作电流28—32mA( 最大不得超过40mA); 工作温度:-30°—80° ;存储温度: -50°—100° ;
(2)动态横滚、俯仰精度≤0.1°; 动态航向精度≤0.5°; 测量范围:俯仰 ±90°、横滚±180°; RS232/485/TTL 接口输出可选;
(3)具有动态测量功能;具有特殊偏置追踪算法消除漂移技功能;倾角精度≤0.1 度;
(4)最高刷新率 50Hz;
7、船载左红右绿的航灯;两侧带有设备工作状态指示灯。
8、远程工控系统;型号 USVCSV1.4,主控系统应该具备 2 路 RS232 串口;1路 485 串口;1 路 CAN 接口; 8 路 PWM 信号输出,4 路可由外部 PWM 切换;4 路 0~12V 电压模拟量采集;12 路综合 IO 输出,可扩展为 SPI 、IIC 总线;板载MPU9250;板载 PWM 切换模组;
9、船载通信系统:艇载通信系统,能够实现最多 32 条船数据互联;水面通信距离大于 2km,与岸基通信距离 2.5km,支持喊话系统。
其中:船载适配电台
(1) 支持 RS232 、RS485 串口数据传输,数据透传;
(2) 频段范围:410~441MHz/210~241MHz;
(3) 地空通信距离 10km;发射功率 5W;
(4) 8 档空速可选;数据包完整输出,双RSSI;
10、岸端数据采集控制软件:能够采集 GPS、电子罗盘、姿态传感器的数据;可以实施控制无人船的主机;并以标准的 MODBUS 协议对外给出数据,控制船;每条船有独立编码;
11、软件开源:提供无人船主控系统的开发例程,并提供源码;给出上位机基于 Labview 的开源源码;
12、艇载自动驾驶系统:无人艇搭载可用于路径规划的自动驾驶系统,并提供该 系统的应用培训;
13、无人艇具有航迹跟踪能力,航迹跟踪偏差优于 0.5 米;
14、具有远程工业控制系统、自动驾驶系统切换控制动力系统的功能, 实现可被 二次开发的运动控制;并提供差动系统的耦合控制、解耦控制的驱动源码;
15、采样系统:可定点、定量的标准化、规范化水质采样功能, 具有采样范围广, 多层次深度采样的优势,最大采样速度 3.8L/min,可定制小容量多采样仓,每次 手动采样为 100 毫升至 2 升。
16、侧深系统:能够水下侧深 250m,防水等级为 IP67,测深范围 300m,波束开角≥6度,采样率 30Hz,频率:200KHz,重量:0.45kg。
Next: 水下摄像系统 UCS-C01
